SÈRIE DE CANVI RÀPID – QCA-25 Un dispositiu de canvi ràpid a l'extrem d'un robot



Categoria principal
Canviador d'eines robòtic / Canviador d'eines de braç final (EOAT) / Sistema de canvi ràpid / Canviador d'eines automàtic / Interfície d'eines robòtiques / Costat del robot / Costat de la pinça / Flexibilitat de les eines / Alliberament ràpid / Canviador d'eines pneumàtic / Canviador d'eines elèctric / Canviador d'eines hidràulic / Canviador d'eines de precisió / Mecanisme de bloqueig de seguretat / Efector final / Automatització / Eficiència del canvi d'eines / Intercanvi d'eines / Automatització industrial / Eines robòtiques de braç final / Disseny modular
Aplicació
L'utillatge de punta de braç (EOAT) s'utilitza àmpliament en indústries com la fabricació d'automòbils, l'electrònica 3C, la logística, el modelat per injecció, l'envasament d'aliments i productes farmacèutics i el processament de metalls. Les seves funcions principals inclouen la manipulació de peces, la soldadura, la polvorització, la inspecció i el canvi ràpid d'eines. L'EOAT millora significativament l'eficiència de la producció, la flexibilitat i la qualitat del producte, convertint-lo en una part essencial de l'automatització industrial moderna.
Característica
Alta precisió
El costat de la pinça d'ajust del pistó juga la funció de posicionament, la qual cosa proporciona una alta precisió de posicionament repetit. Les proves d'un milió de cicles mostren que la precisió real és molt superior al valor recomanat.
Alta resistència
El pistó de bloqueig amb un gran diàmetre de cilindre té una forta força de bloqueig, el dispositiu ràpid d'extrem del robot SCIC té una forta capacitat anti-torque. En bloquejar, no hi haurà tremolors a causa del moviment d'alta velocitat, evitant així fallades de bloqueig i garantint una precisió de posicionament repetida.
Alt rendiment
El mecanisme de bloqueig amb disseny de superfície multicònica, components de segellat de llarga durada i sonda de contacte elàstica d'alta qualitat s'adopten per garantir el contacte proper del mòdul de senyal.



Paràmetre d'especificació
| Sèrie de canvi ràpid | ||||
| Model | Càrrega útil màxima | Via de gas | Força de bloqueig a 80 psi (5,5 bar) | Pes del producte |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
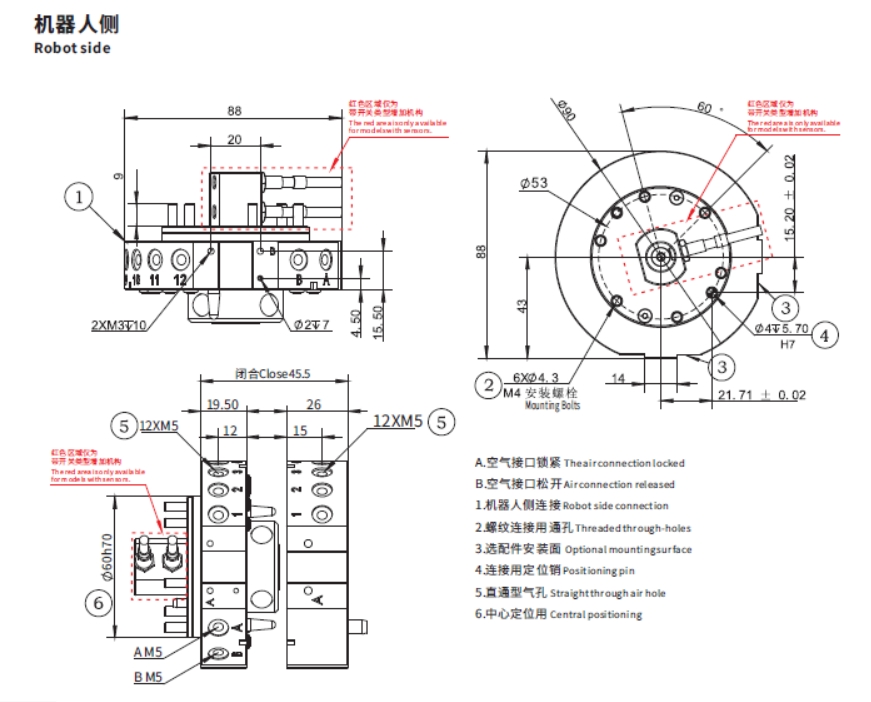
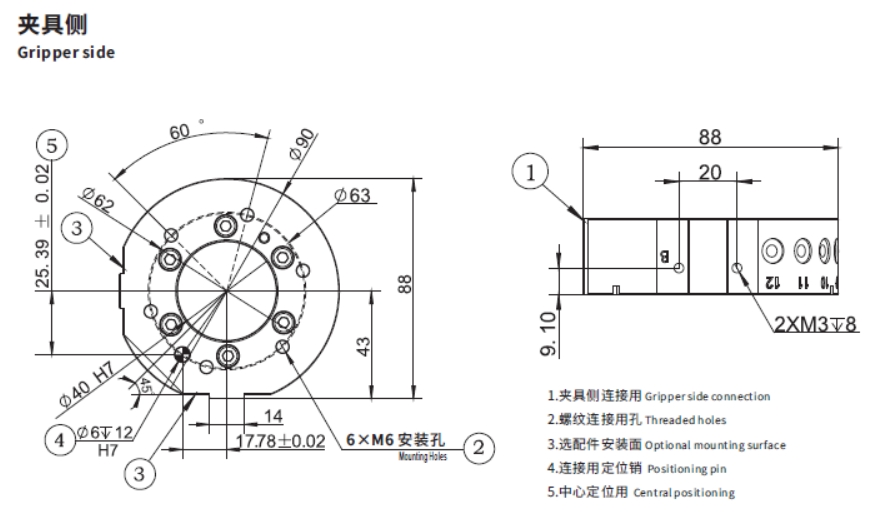
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

Costat del robot

Costat de la pinça

Interruptor de corretja lateral del robot
Mòdul aplicable
Tipus de mòdul
| Nom del producte | Model | PN | Voltatge de treball | Corrent de treball | Connector | Connector PN |
| Mòdul de senyal lateral del robot | QCSM-15R1 | 7.Y00965 | 24V | 2,5A | DB15R1-10001. | 1.Y10163 |
| Mòdul de senyal lateral de la pinça | QCSM-15G1 | 7.Y00966 | 24V | 2,5A | DB15G1-10001. | 1.Y10437 |
①La longitud del cable és d'1 metre
Mòdul HF: línia de sortida recta
| Nom del producte | Model | PN |
| Mòdul d'alta freqüència del costat del robot | QCHFM-02R-1000 | 7.Y02086 |
| Mòdul d'alta freqüència del costat de la pinça | QCHFM-02G-1000 | 7.Y02087 |
Mòdul elèctric de 15 nuclis: línia recta
| Nom del producte | Model | PN |
| Mòdul elèctric de 15 nuclis del costat del robot | QCHFM-15R1-1000 | 7.Y02097 |
| Mòdul elèctric de 15 nuclis del costat de la pinça | QCHFM-15G1-1000 | 7.Y02098 |
Mòdul d'alimentació: línia de sortida recta
| Nom del producte | Model | PN |
| Mòdul d'alta freqüència del costat del robot | QCSM-08R-1000 | 7.Y02084 |
| Mòdul d'alta freqüència del costat de la pinça | QCSM-08G-1000 | 7.Y02085 |
Interfície de cable de xarxa RJ45S
| Nom del producte | Model | PN |
| Mòdul servo RJ455 del costat del robot | QCSM-RJ45*5M-06R | 7.Y02129 |
| Mòdul servo RJ455 del costat de la pinça | QCSM-RJ45*5M-06G | 7.Y02129 |
El nostre negoci







