BRAÇOS ROBOTICS SCARA – Braç robòtic col·laboratiu Z-Arm-4160B





Categoria principal
Braç robòtic industrial / Braç robòtic col·laboratiu / Pinça elèctrica / Actuador intel·ligent / Solucions d'automatització
Aplicació
Els cobots SCIC Z-Arm són robots col·laboratius lleugers de 4 eixos amb motor d'accionament integrat, i ja no necessiten reductors com altres SCARA tradicionals, cosa que redueix el cost en un 40%. Els cobots SCIC Z-Arm poden realitzar funcions que inclouen, entre d'altres, la impressió 3D, la manipulació de materials, la soldadura i el gravat làser. Són capaços de millorar considerablement l'eficiència i la flexibilitat del vostre treball i producció.
Característiques

Alta precisió
Repetibilitat
±0,02 mm
Eix Z personalitzat
0,1-0,8 m
Càrrega útil gran
Suport de 4 kg
Màxim 5 kg
Velocitat més alta
Velocitat lineal màxima 2 m/s
(Càrrega del suport 5 kg)
Braç robòtic de gran abast, alta precisió i 4 eixos, fàcil d'utilitzar
Alta precisió
Repetibilitat: ±0,02 mm
Envergadura de braç gran
Eix J1: 325 mm,Eix J2: 275 mm
Eix Z personalitzat
El recorregut amunt-avall es pot personalitzar entre 0,1 m i 0,8 m
Estalvi d'espai
La unitat/controlador està integrada
Simple i fàcil d'utilitzar
El nouvingut que no coneixia el braç robòtic també pot ser fàcil d'utilitzar, la interfície s'obre.
Alta velocitat
La seva velocitat és de 2000 mm/s sota una càrrega de 4 kg

Productes relacionats



Paràmetre d'especificació
El SCIC Hitbot Z-Arm 4160B està dissenyat per SCIC Tech, és un robot col·laboratiu lleuger, fàcil de programar i utilitzar, compatible amb SDK. A més, és compatible amb la detecció de col·lisions, és a dir, s'atura automàticament en tocar humans, la qual cosa és una col·laboració intel·ligent home-màquina amb una alta seguretat.
| Braç robòtic col·laboratiu Z-Arm 4160B | Paràmetres |
| Longitud del braç d'1 eix | 325 mm |
| Angle de rotació d'1 eix | ±90° |
| Longitud del braç de 2 eixos | 275 mm |
| Angle de rotació de 2 eixos | ±164° Opcional: 15-345 graus |
| Carrera de l'eix Z | 410 L'alçada es pot personalitzar |
| Rang de rotació de l'eix R | ±1080° |
| Velocitat lineal | 2000 mm/s (càrrega útil 4 kg) |
| Repetibilitat | ±0,02 mm |
| Càrrega útil estàndard | 4 kg |
| Càrrega útil màxima | 5 kg |
| grau de llibertat | 4 |
| Font d'alimentació | 220V/110V50-60HZ adaptat a una potència màxima de 48VDC de 960W |
| Comunicació | Ethernet |
| Expansibilitat | El controlador de moviment integrat proporciona 24 E/S + expansió sota el braç |
| L'eix Z es pot personalitzar en alçada | 0,1 m ~ 0,8 m |
| Ensenyament d'arrossegament de l'eix Z | / |
| Interfície elèctrica reservada | Configuració estàndard: cables de 24 * 23awg (sense blindatge) des del panell del sòcol a través de la coberta del braç inferior Opcional: 2 tubs de buit φ4 a través del panell i la brida del sòcol |
| Pinces elèctriques HITBOT compatibles | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Respirant llum | / |
| Rang de moviment del segon braç | Estàndard: ±164° Opcional: 15-345° |
| Accessoris opcionals | / |
| Entorn d'ús | Temperatura ambient: 0-45 °C Humitat: 20-80% HR (sense gelades) |
| Entrada digital del port d'E/S (aïllada) | 9+3+extensió de l'avantbraç (opcional) |
| Sortida digital del port d'E/S (aïllada) | 9+3+extensió de l'avantbraç (opcional) |
| Entrada analògica del port d'E/S (4-20 mA) | / |
| Sortida analògica del port d'E/S (4-20 mA) | / |
| Alçada del braç del robot | 860 mm |
| Pes del braç robòtic | Pes net de 36,5 kg amb carrera de 410 mm |
| Mida de la base | 250 mm * 250 mm * 15 mm |
| Distància entre els forats de fixació de la base | 200 mm * 200 mm amb quatre cargols M8 * 20 |
| Detecció de col·lisions | √ |
| Ensenyament de drag | √ |
Selecció ideal per a tasques de muntatge lleugeres
El Z-Arm XX60B és un braç robòtic de 4 eixos amb una gran envergadura, que ocupa una àrea petita, molt adequat per col·locar-lo a l'estació de treball o dins de la màquina, és una selecció ideal per a tasques de muntatge lleugeres.


Lleuger amb un gran angle de rotació

El pes del producte és d'uns 36,5 kg, la seva càrrega màxima pot ser de fins a 5 kg, l'angle de rotació de l'eix 1 és de ±90°, l'angle de rotació dels eixos 2 és de ±164°, el rang de rotació de l'eix R pot ser de fins a ±1080°.
Gran abast de braç, àmplia aplicació

El braç Z XX60B té una llarga envergadura, la longitud d'1 eix és de 325 mm, la longitud de 2 eixos és de 275 mm, la seva velocitat lineal pot arribar als 2000 mm/s sota una càrrega de 4 kg.


Flexible de desplegar, ràpid de canviar
El Z-Arm XX60B té les característiques de ser lleuger, estalviador d'espai i flexible de desplegar, és adequat per a moltes aplicacions i no canviaria el disseny de producció anterior, inclosa la rapidesa per canviar la seqüència del procés i completar petits lots de producció, etc.
Arrossegueu Ensenyament per completar el programa

El programari es basa en el disseny gràfic, ha proporcionat punt, senyal de sortida, pinça elèctrica, safata, retard, subprocés, reinici i altres mòduls funcionals bàsics, els usuaris poden arrossegar el mòdul per controlar el braç del robot a l'àrea de programació, la interfície és senzilla, però la funció és potent.
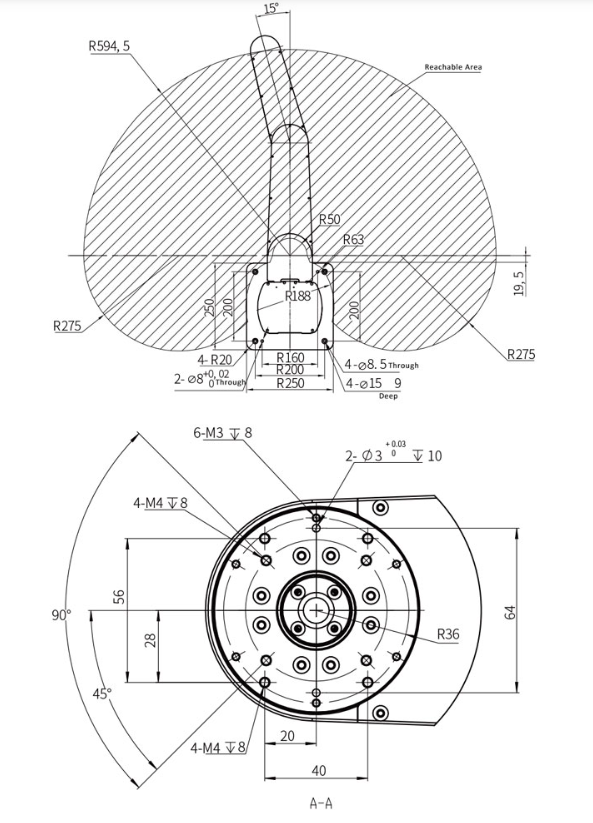
Rang de moviment Versió M1 (girar cap a fora)
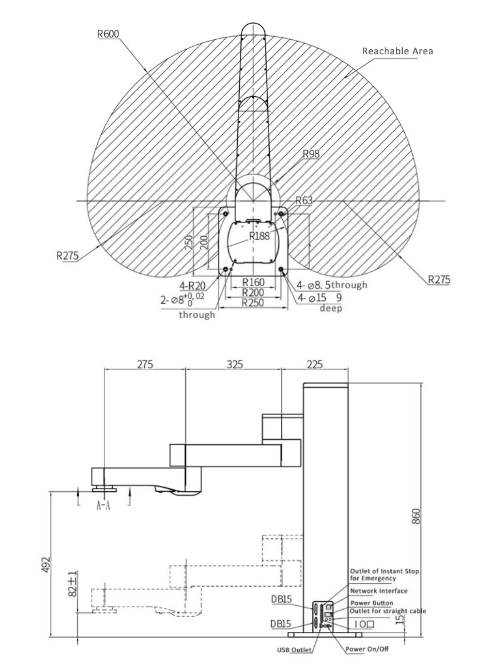
Recomanació del connector DB15

Model recomanat: Mascle xapat en or amb carcassa d'ABS YL-SCD-15M Femella xapada en or amb carcassa d'ABS YL-SCD-15F
Descripció de la mida: 55 mm * 43 mm * 16 mm
(Vegeu la figura 5)
Diagrama de l'entorn d'ús extern del braç robòtic

El nostre negoci


Categories de productes
-

SÈRIE DE CANVI RÀPID – QC-150 Manual rodó...
-

ROBOTS ELEVADORS – Robot elevador rotatiu SJV...
-

CARRETÓ ELEVADOR INTEL·LIGENT – SFL-CDD14-CE Laser SLAM ...
-

SÈRIE TM AI COBOT – TM12M Cobot d'IA de 6 eixos
-

SÈRIE TM AI COBOT – TM16M Cobot d'IA de 6 eixos
-

SÈRIE DE PINZA ELÈCTRICA HITBOT – Z-EFG-30 Paral·lel...