SÈRIE DE PINCES ELÈCTriques HITBOT – Pinça elèctrica col·laborativa Z-EFG-L



Categoria principal
Braç robòtic industrial / Braç robòtic col·laboratiu / Pinça elèctrica / Actuador intel·ligent / Solucions d'automatització
Aplicació
Les pinces robòtices de la sèrie SCIC Z-EFG són de mida petita i tenen un sistema servo integrat, que permet aconseguir un control precís de la velocitat, la posició i la força de tancament. El sistema de subjecció d'avantguarda SCIC per a solucions d'automatització us permetrà obrir noves possibilitats per automatitzar tasques que mai no havíeu pensat possibles.

Característica

· Obertura i tancament ràpids
· Adherència en espais estrets, adherència de productes fràgils
·Pinça elèctrica exclusiva de 8 mm de recorregut per a braç robòtic de sis eixos
·Llarga vida útil: desenes de milions de cicles, superant les urpes d'aire
· Controlador integrat: mida reduïda, fàcil integració
·Mode de control: entrada i sortida d'E/S
Disseny especial per a braç robòtic de sis eixos, pinça elèctrica de 12 mm de carrera
Endolla i reprodueix
Disseny especial per a braç robot de sis eixos
Alta freqüència
El temps més curt d'un sol cop és de només 0,2 s
Conducció i controlador integrats
Sistema servo integrat, connectar i utilitzar
El controlador està integrat
Ocupa poc espai, convenient per integrar.
La cua es pot canviar
La seva cua es pot canviar per satisfer diversos requisits.
Subjecció suau
Pot subjectar els objectes fràgils

● Promovent una revolució en la substitució de les pinces pneumàtiques per pinces elèctriques, la primera pinça elèctrica amb sistema servo integrat a la Xina.
● Substitut perfecte per a compressor d'aire + filtre + vàlvula solenoide + vàlvula d'acceleració + pinça pneumàtica
● Vida útil de múltiples cicles, d'acord amb el cilindre japonès tradicional




Paràmetre d'especificació
Z-EFG-L és una pinça paral·lela elèctrica robòtica de 2 dits amb una força de subjecció de 30 N, que permet una subjecció suau, com ara la subjecció d'ous, pa, tubs de tetina, etc.
| Núm. de model Z-EFG-L | Paràmetres |
| Ictus total | 12 mm |
| Força d'agafada | 30N |
| Repetibilitat | ±0,02 mm |
| Pes d'agafada recomanat | ≤0,5 kg |
| Mode de transmissió | Cremallera + guia de rodets transversals |
| Reposició de greix dels components mòbils | Cada sis mesos o 1 milió de moviments / temps |
| Temps de moviment de traç unidireccional | 0,2 segons |
| Rang de temperatura de funcionament | 5-55 ℃ |
| Rang d'humitat de funcionament | RH35-80 (sense gelades) |
| Mode de moviment | Dos dits es mouen horitzontalment |
| Control de l'ictus | No ajustable |
| Ajust de la força de subjecció | No ajustable |
| Pes | 0,4 kg |
| Dimensions (L*A*A) | 68 * 68 * 113,6 mm |
| Col·locació del controlador | Integrat |
| Poder | 5W |
| Tipus de motor | CC sense escombretes |
| Tensió nominal | 24V ± 10% |
| corrent màxim | 1A |
| Braç robòtic adaptable de sis eixos | UR, Aubo |
Braç robòtic de sis eixos, Plug and Play
La pinça elèctrica Z-EFG-L pot ser compatible amb els braços robòtics col·laboratius convencionals del mercat, té un alt grau de protecció i una gran càrrega.


Conducció i controlador integrats
La Z-EFG-L és una petita pinça elèctrica que té un sistema servo integrat, té una carrera de 12 mm, la força de tancament és de 30 N, una Z-EFG-L pot substituir el compressor d'aire + filtre + vàlvula magnètica electrònica + vàlvula d'acceleració + pinça d'aire.
Figura petita, flexible per instal·lar
La mida de la pinça elèctrica Z-EFG-L és de 68 x 68 x 113,6 mm de llargada * 68 x 113,6 mm d'alçada, la seva estructura és compacta, admet múltiples modes d'instal·lació, el seu controlador està integrat i ocupa poc espai, cosa que permet gestionar fàcilment diversos requisits per a les tasques de subjecció.


Reacció ràpida, control de precisió
El temps més curt d'una sola cursa és de 0,45 s, la seva part posterior es pot canviar fàcilment, els clients poden ser flexibles per ajustar la pinça elèctrica segons els seus requisits de producció.
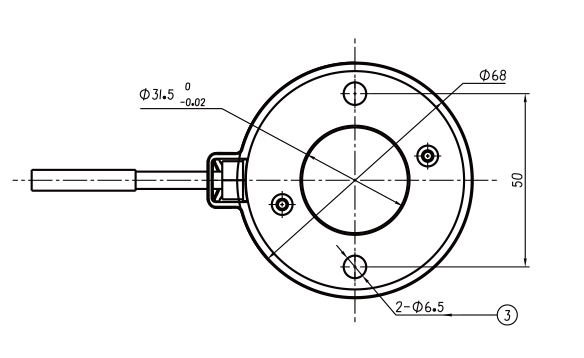
Diagrama d'instal·lació de dimensions
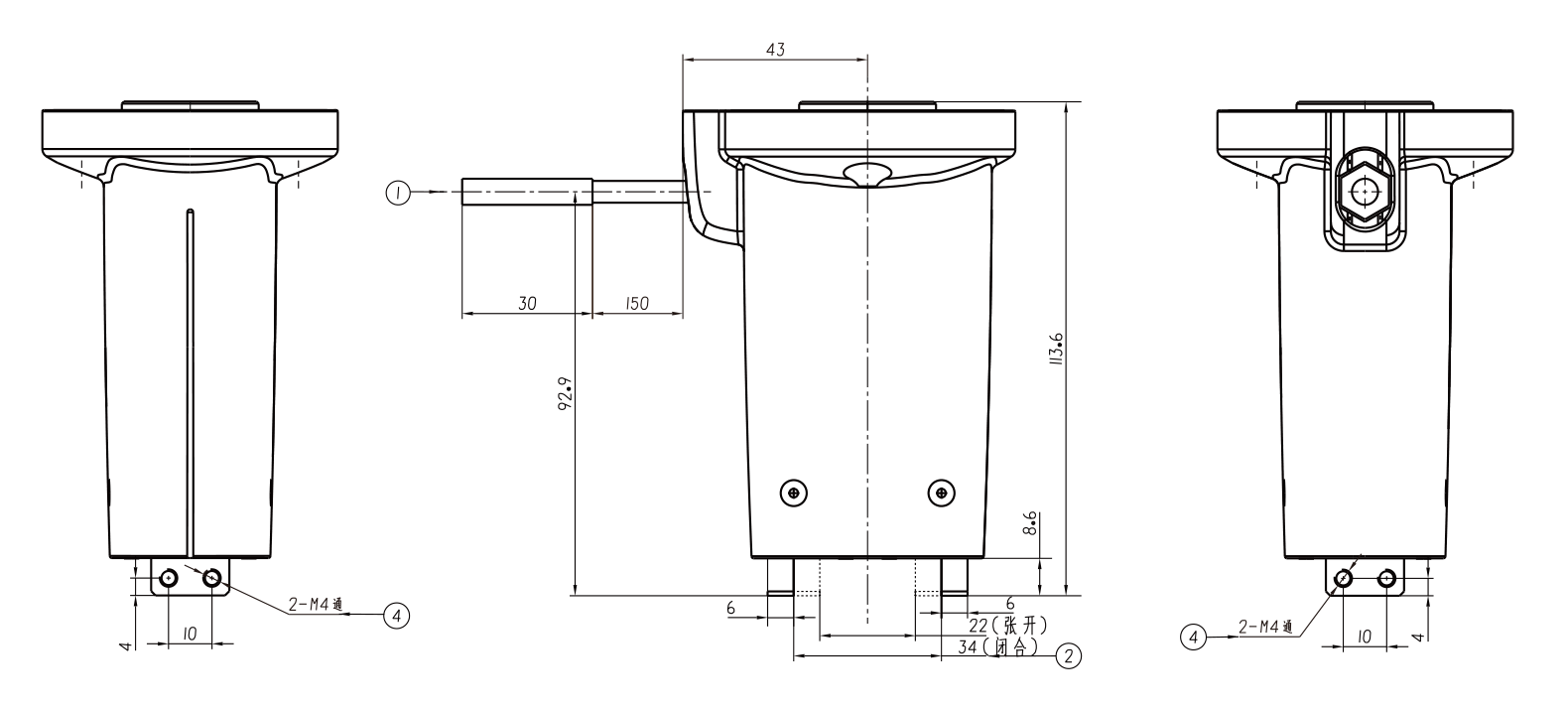
① RKMV8-354 Connector d'aviació de cinc nuclis a RKMV8-354
② La carrera de la pinça elèctrica és qwmm
③ Posició d'instal·lació, utilitzeu dos cargols M6 per connectar amb la brida a l'extrem del braç del robot UR
④ Posició d'instal·lació, posició d'instal·lació del dispositiu (cargol M6)
Paràmetres elèctrics
Tensió nominal 24 ± 2 V
Corrent 0.4A

El nostre negoci


Categories de productes
-

SÈRIE DE PINCES ELÈCTriques HITBOT – Z-EFG-C5...
-

SÈRIE DE PINCES ELÈCTriques HITBOT – Z-EFG-C3...
-

SÈRIE DE PINCES ELÈCTriques HITBOT – Z-ECG-20...
-

DH ROBOTICS SERVO ELÈCTRIC DE PINÇA SÈRIE PGE –...
-

SÈRIE DE PINZA ELÈCTRICA HITBOT – Z-EFG-26 Paral·lel...
-

PINÇA SERVOELÈCTRICA DH ROBOTICS SÈRIE CG – ...