SÈRIE DE PINCES ELÈCTriques HITBOT – Pinça elèctrica rotativa Z-ERG-20




Categoria principal
Braç robòtic industrial / Braç robòtic col·laboratiu / Pinça elèctrica / Actuador intel·ligent / Solucions d'automatització
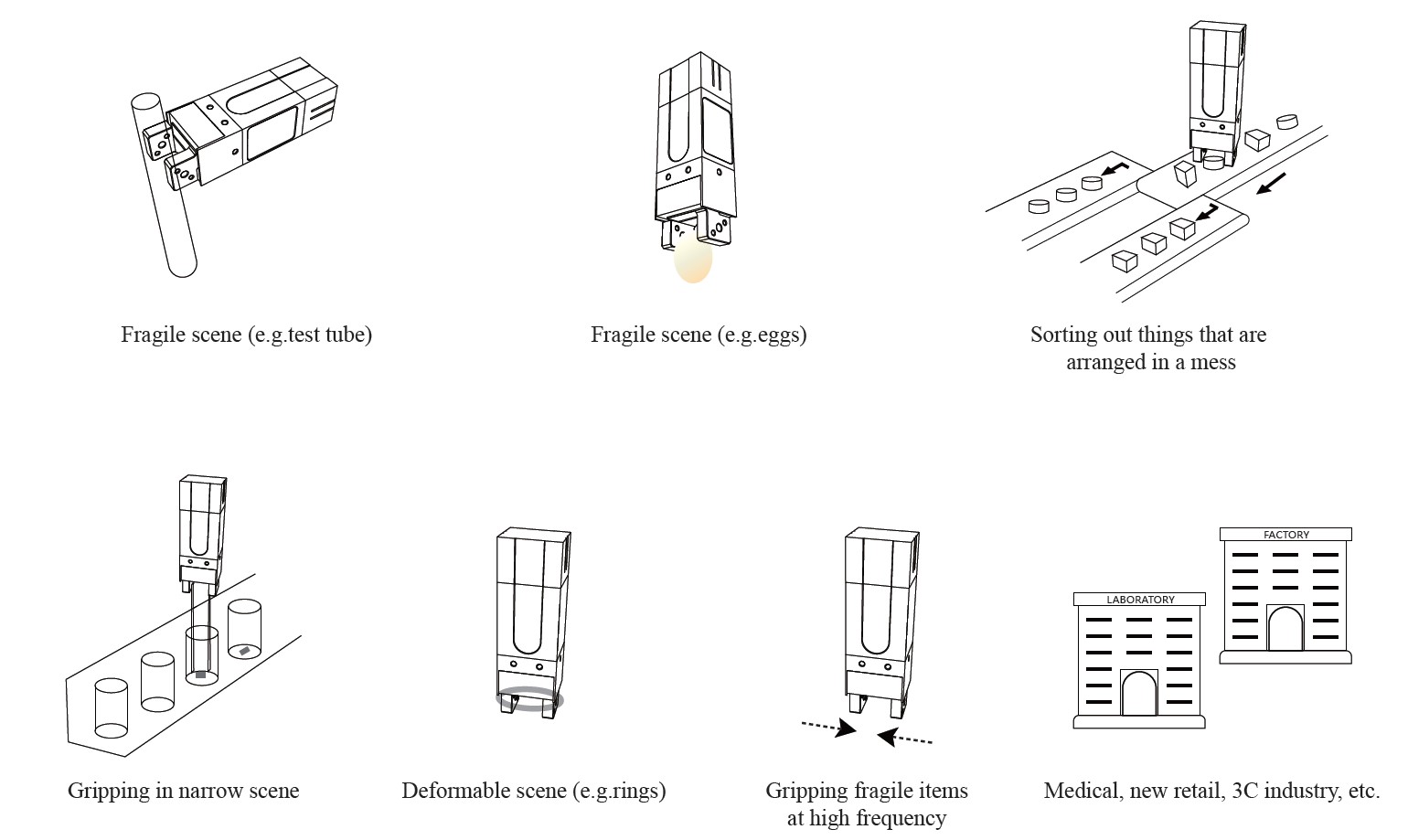
Aplicació
Les pinces robòtiques de la sèrie SCIC Z són de mida petita i tenen un sistema servo integrat, que permet aconseguir un control precís de la velocitat, la posició i la força de tancament. El sistema de subjecció d'avantguarda SCIC per a solucions d'automatització us permetrà obrir noves possibilitats per automatitzar tasques que mai no havíeu pensat possibles.
Característica

· Admet rotació infinita i rotació relativa, sense anell lliscant, baix cost de manteniment
· La força de rotació i agafament, la posició i la velocitat es poden controlar amb precisió
· Llarga vida útil, múltiples cicles, millor rendiment que la pinça prenumàtica
· Controlador integrat: ocupa poc espai i fàcil d'integrar
·Mode de control: suporta el control de bus Modbus i E/S



Paràmetre d'especificació
El manipulador Z-ERG-20 és fàcil de treballar amb persones i admet una subjecció suau. La pinça elèctrica està altament integrada i té molts avantatges:
●Suport de rotació infinita i rotació relativa, sense anell lliscant, baix cost de manteniment.
●La rotació, la força de subjecció, el trepant i la velocitat es poden controlar amb precisió.
●Llarga vida útil: desenes de milions de cercles, millor que els compressors d'aire.
●Controlador integrat, per estalviar espai, fàcil d'integrar.
●Mode de control: compatible amb Modbus i control d'E/S.
| Núm. de model Z-ERG-20 | Paràmetres |
| Ictus total | 20 mm ajustable |
| Força d'agafada | 10-35N ajustable |
| Repetibilitat | ±0,2 mm |
| Pes d'agafada recomanat | ≤0,4 kg |
| Mode de transmissió | Cremallera + Guia lineal |
| Reposició de greix dels components mòbils | Cada sis mesos o 1 milió de moviments / temps |
| Temps de moviment de traç unidireccional | 0,20 segons |
| Parell màxim de rotació | 0,3 Nm |
| Velocitat màxima de rotació | 240 rpm |
| Rang de rotació | Rotació infinita |
| Reacció giratòria | ±1° |
| Pes | 1,0 kg |
| Dimensions | 54 * 54 * 141 mm |
| Tensió de funcionament | 24V±10% |
| Corrent nominal | 1,5A |
| Corrent màxim | 3A |
| Poder | 50W |
| Classe de protecció | IP20 |
| Tipus de motor | Servomotor |
| Rang de temperatura de funcionament | 5-55 ℃ |
| Rang d'humitat de funcionament | RH35-80 (Sense escarpadura) |
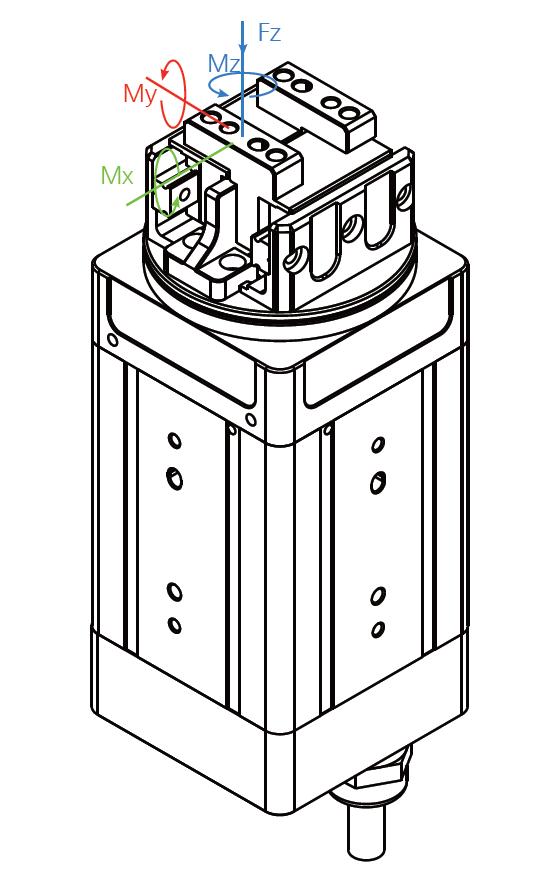
| Càrrega estàtica admissible en direcció vertical | |
| Fz: | 100N |
| Parell admissible | |
| Mx: | 1,35 Nm |
| El meu: | 0,8 Nm |
| Mz: | 0,8 Nm |
Desplaçament del centre de gravetat de la càrrega
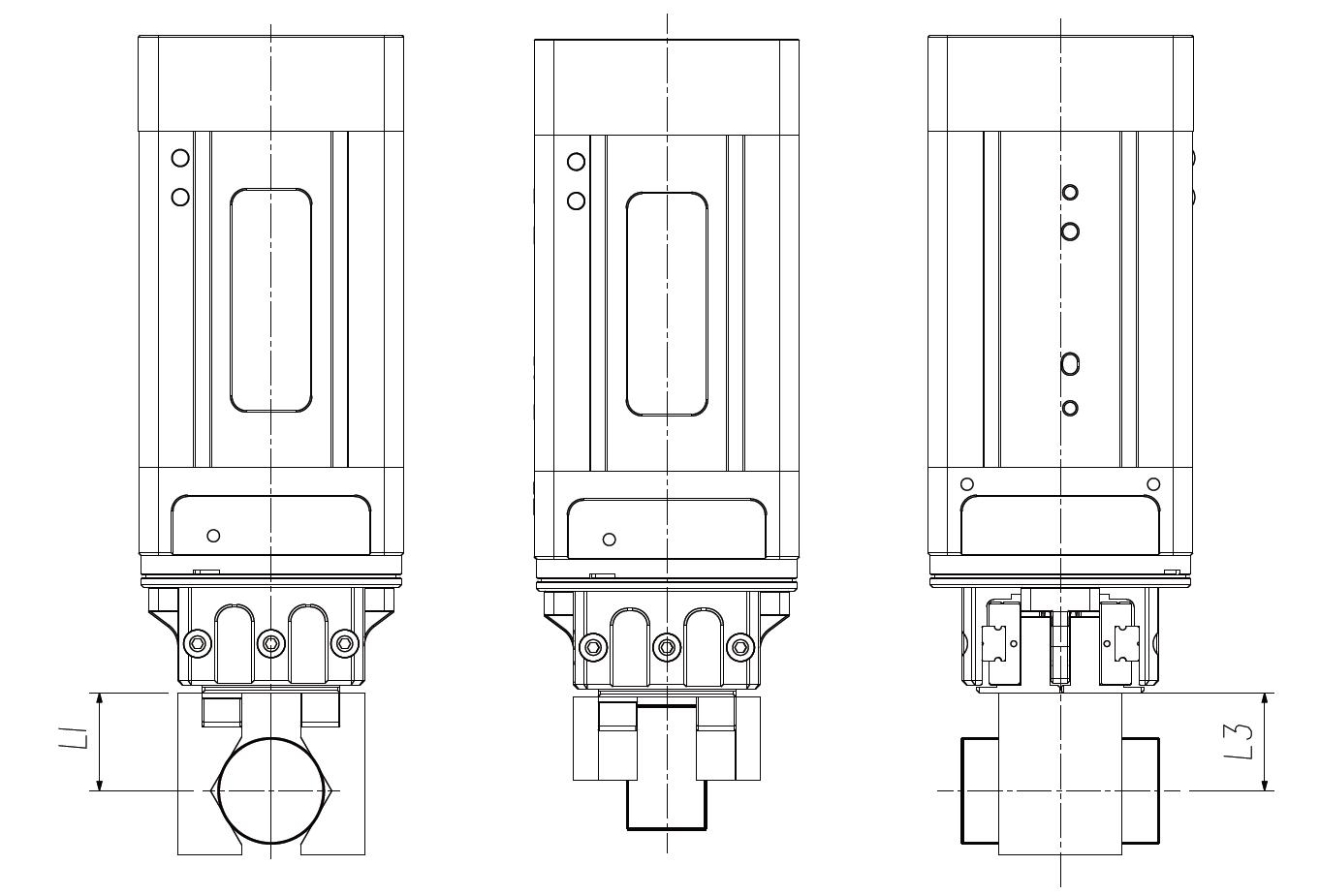
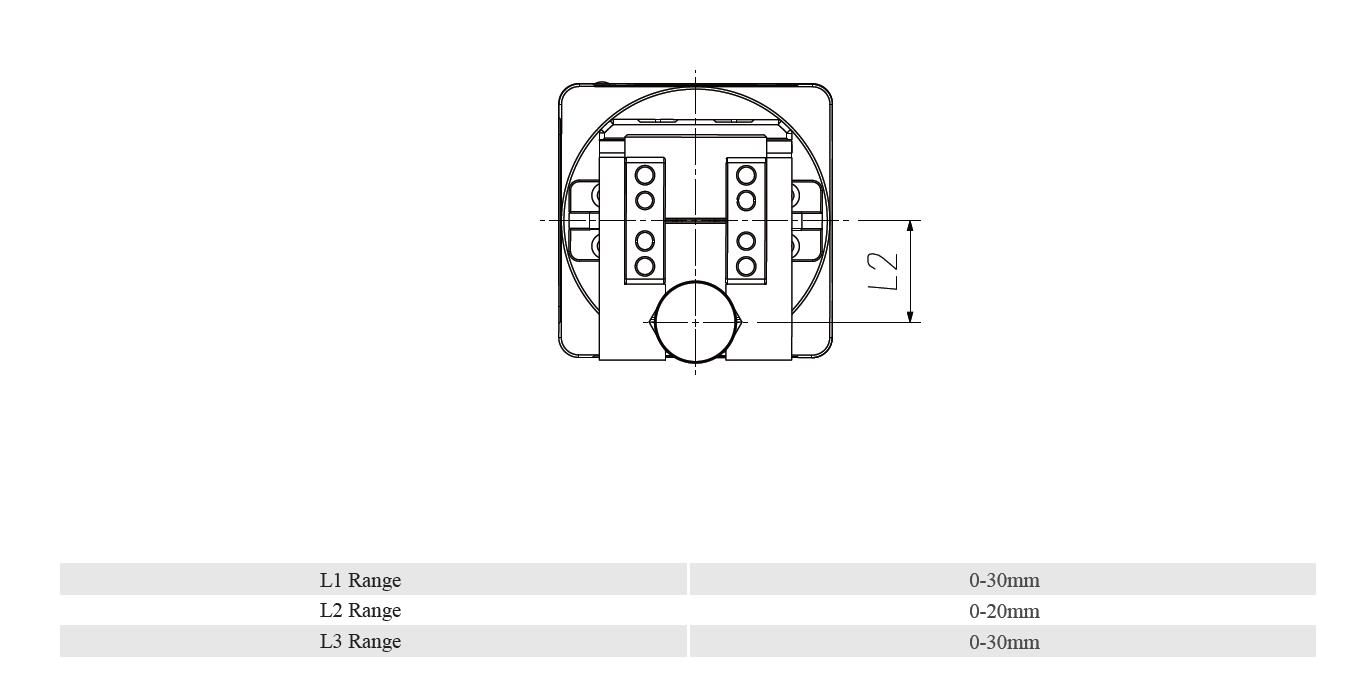
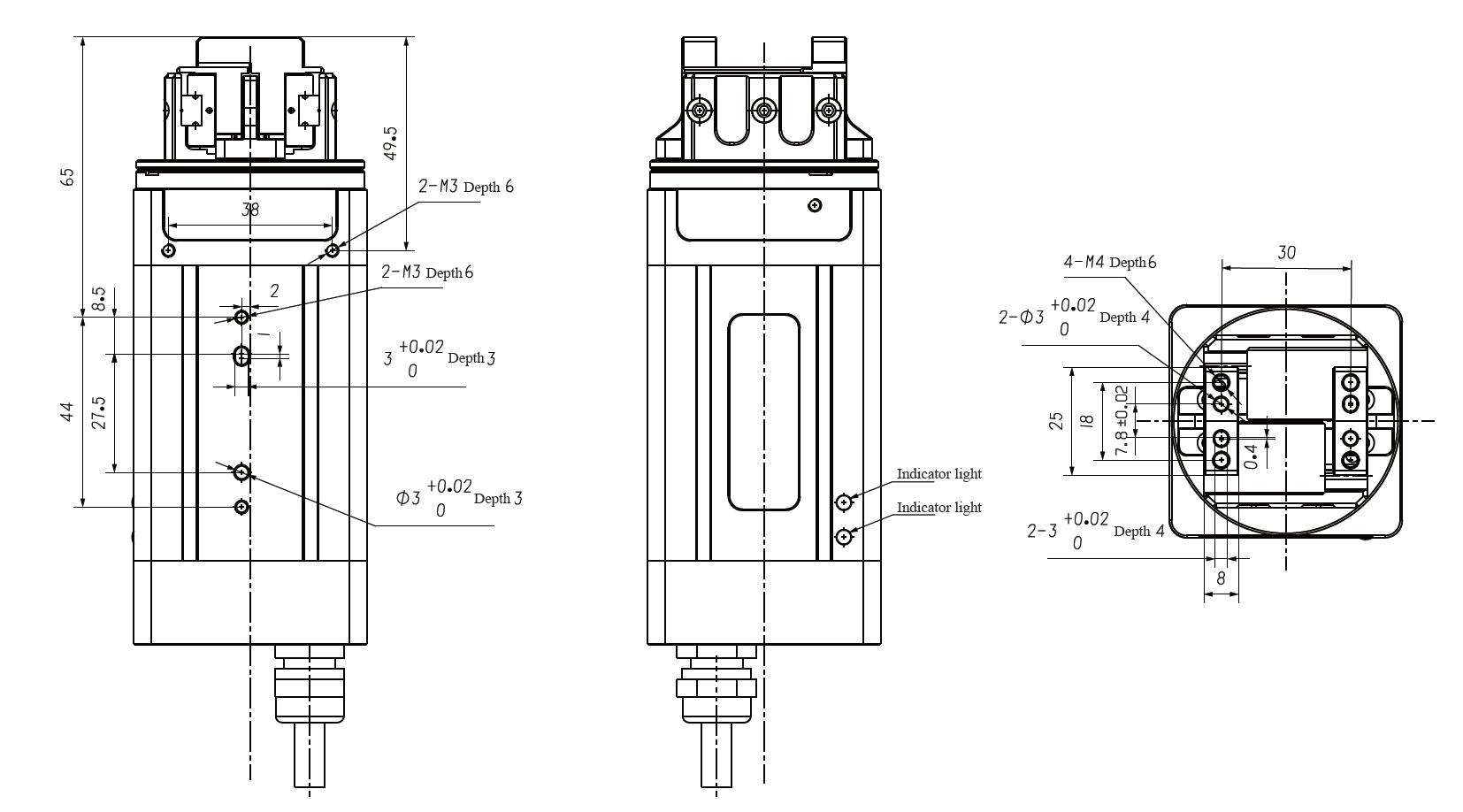
Diagrama d'instal·lació de dimensions
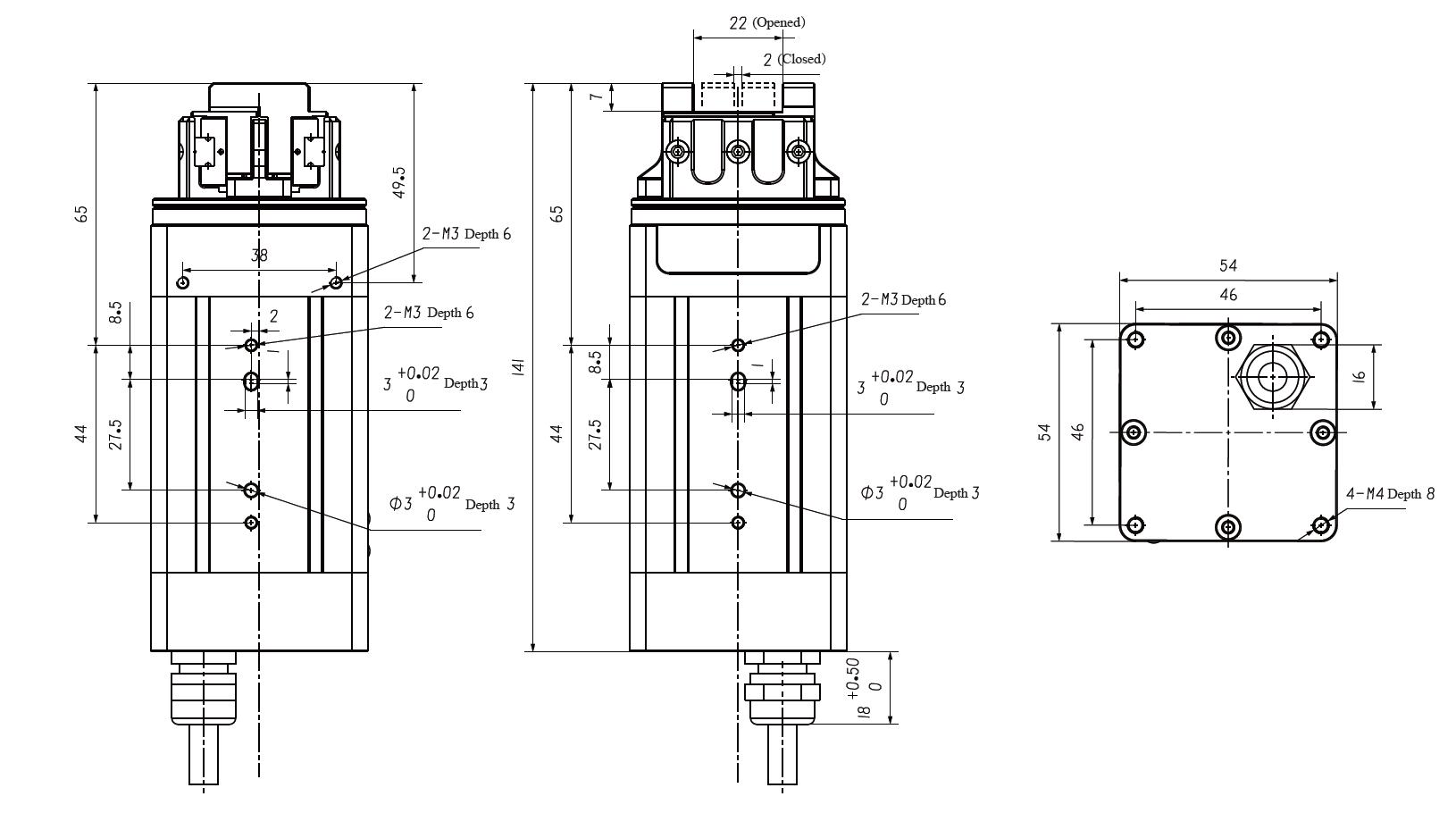
① RKMV8-354 Connector d'aviació de cinc nuclis a RKMV8-354
② La carrera de la pinça elèctrica és de 20 mm
③ Posició d'instal·lació, utilitzeu dos cargols M6 per connectar amb la brida a l'extrem del braç del robot UR
④ Posició d'instal·lació, posició d'instal·lació del dispositiu (cargol M6)
⑤ Posició d'instal·lació, posició d'instal·lació de fixació (3 forats cilíndrics per a passadors)
El nostre negoci


Categories de productes
-

SÈRIE DE PINCES ELÈCTriques HITBOT – Z-EFG-40...
-

SÈRIE DE MÒDULS DE PINÇA – FPT Tres dits...
-

SÈRIE DE PINCES ELÈCTRIQUES HITBOT – Z-EMG-4 Paral·lel...
-

SÈRIE DE PINZA ELÈCTRICA HITBOT – Z-EFG-20 Paral·lel...
-

SÈRIE DE PINCES ELÈCTriques HITBOT – Z-EFG-C5...
-

DH ROBOTICS SERVO ELÈCTRIC DE PINÇA SÈRIE PGE –...